连接器自动嵌合保证系统
“CARA”
从连接器自动嵌合的
验证到设备导入,一站式提供
兼容 I-PEX 以外的连接器,
保证连接器自动嵌合的整体解决方案
"CARA" 是 I-PEX 的连接器自动嵌合系统,可实现高难度连接器嵌合工序的自动化。从连接器自动嵌合的初期确认(咨询)到验证,再到嵌合自动化设备的方案提出、制作与交付,为您提供整体解决方案。
不仅是 I-PEX 制造的连接器,还可验证各类连接器及线束的自动嵌合。从构想阶段到具体的课题事项,欢迎随时咨询。
CARA 解决您关于连接器自动嵌合的烦恼
CARA 最适合在连接器及线束嵌合方面有以下烦恼的客户:
- 希望将连接器嵌合工序自动化
- 希望将半嵌合风险降为零
- 希望在工序内确保可追溯性
- 正在考虑导入能够实现连接器自动嵌合的设备
- 希望从连接器自动嵌合的构想阶段开始咨询
连接器自动嵌合
咨询
连接器嵌合工
序难以自动化
连接器嵌合即使是微小的位置偏移或个体差异也容易发生半嵌合,
即便机器人能够插入连接器,也很难保证“是否正确嵌合”。
在全球范围内,自动化也几乎没有进展,
连接器嵌合中的质量风险与作业负荷成为课题。
插入不足、半嵌合
风险
手工作业时嵌合的完成依赖感觉,
因此会发生插入不足或半嵌合,
成为产品不良或故障的原因。
位置偏移・个体差异・偏差的
存在
由于连接器的位置精度及个体差异,
仅靠机器人的简单位置控制
难以实现稳定的嵌合。
难以实现质量保证
和可追溯性
由于嵌合时的数据未被记录,
质量保证困难,
无法确保可追溯性。
CARA是用于将现难以自动化的
连接器嵌合工序
自动化的系统。
CARA是什么
Connector
Assembly
Robotics
Automation
CARA是
整合连接器自动嵌合所需的各项要素、
用于构建自动化设备的
整体解决方案。
I-PEX 将"在连接器开发中积累的专业知识"与"机器人、
传感器技术"相融合
机器人、传感器
技术
在连接器开发中积累的
专业知识

作为连接器制造商
拥有丰富业绩的 I-PEX,
凭借对连接器的深入理解,
为您提出最优的自动嵌合解决方案。
提供连接器自动插入所需的
全部解决方案
-
 连接器
连接器
-
 线束
线束
-
 传感器
传感器
-
 机器人
机器人
-
 夹爪(Gripper)
夹爪(Gripper)
-
 视觉
视觉
-
 系统
系统
-
 治具
治具
-
 验证
验证
-
 设备化・导入
设备化・导入
I-PEX 备齐连接器自动插入所需的
全部要素,并提供给客户。
CARA 所实现的目标
CARA 将基于图像识别的位置补正与基于插入力检测的判定相结合加以运用。
I-PEX 不仅让连接器"能够"自动嵌合,更将其构建到可在量产工序中"稳定运行的状态"。
可减少连接器及线束嵌合中的不良,解决作业人员不足及人工成本上涨的问题。
在专用设施"CARA Lab"
验证连接器自动嵌合
连接器自动嵌合的专业设施"CARA Lab"
将验证连接器自动嵌合的可行性,
并向客户提供报告。
通过专用末端执行器保证
连接器自动嵌合
通过连接器自动嵌合专用的机器人末端执行器,
以力觉检测对嵌合进行可靠判定。
防止半嵌合及插入不足,保证质量。
将验证结果转化为设备方案,
并提供从设计到导入的一站式支持
基于在"CARA Lab"的验证结果与客户的需求,
为客户的生产线设计・制作最优设备,
并支持至投入运行。
CARA 的目标是
验证客户的连接器嵌合工序,
并将连接器嵌合工序实现
自动化。
连接器自动嵌合系统
"CARA" 的导入流程
从初期确认(咨询)到自动嵌合的验证,再到自动嵌合的设备化,I-PEX 提供整体解决方案。
根据客户的生产线,灵活定制布局、控制规格及数据联动等。
-
1
自动嵌合的初期确认
(咨询)接收客户的对象产品或工件,判定该产品或工序中连接器及线束的自动嵌合是否可行。
- 基于对象产品・工件进行确认
- 课题梳理・方向性探讨
- 提供初期判定报告
-
2
在"CARA Lab"
进行自动嵌合验证在"CARA Lab"实际验证自动嵌合。从嵌合试验所需的软件、硬件设计,I-PEX 均可一贯对应。
- 在"CARA Lab"进行嵌合试验
- 软件、硬件设计、治具制作
- 以视频・报告形式提交验证结果
-
3
自动嵌合设备的制作、交付
基于自动嵌合的验证结果及与客户达成一致的规格,制作并交付实际的生产设备。在客户的工序中实现可靠的自动嵌合。
- 根据客户规格进行设备设计・制作
- 设备整套的交付・启动支持
- 投入运行后的支持
连接器自动嵌合咨询
CARA 带来的可追溯性
CARA 通过运用 I-PEX 专为连接器自动嵌合工序开发的机器人末端执行器"ES-Gripper",实时检测连接器嵌合时的插入力,并根据预先设定的条件判定嵌合状态。
通过在工序内设定越锁(Lock 越过)、到底(顶到位)、拉拔检查等嵌合条件,防止半嵌合及插入不足。判定结果及插入力数据可作为履历保存,可作为质量保证及可追溯性的一部分加以运用。
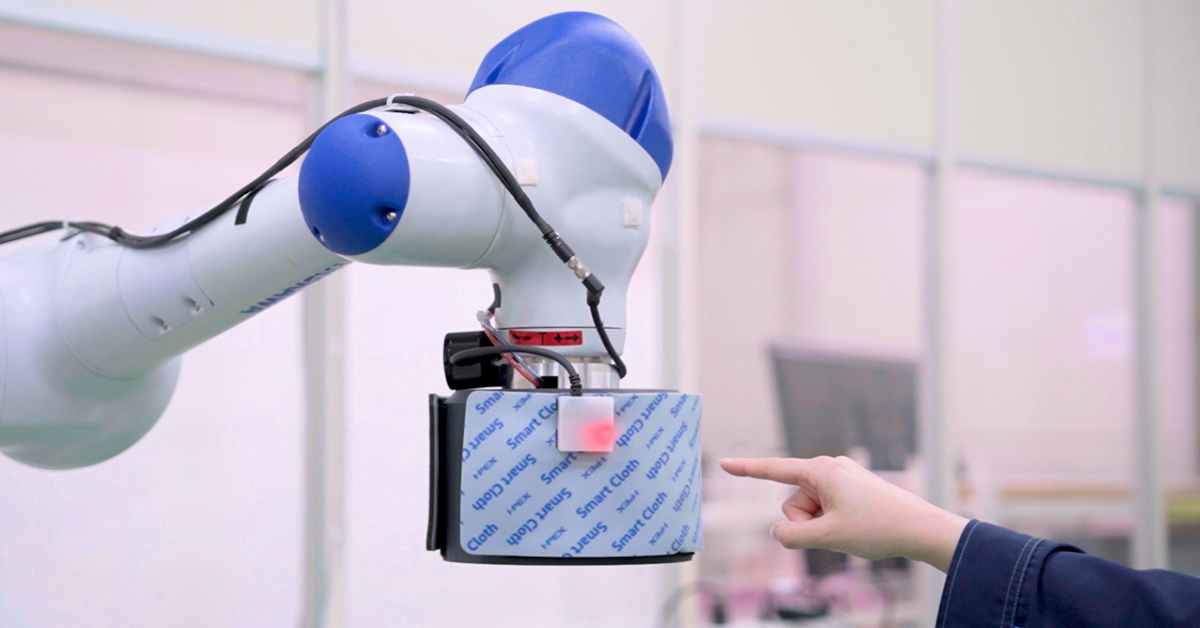
运用 CARA
专用机器人末端执行器
"ES-Gripper®"
担保 CARA 自动嵌合保证的,正是 I-PEX 专为连接器自动嵌合开发的机器人末端执行器"ES-Gripper®"。
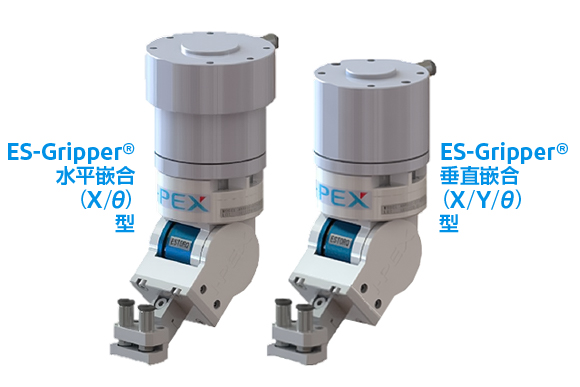 ES-Gripper® 水平嵌合型与垂直嵌合型
ES-Gripper® 水平嵌合型与垂直嵌合型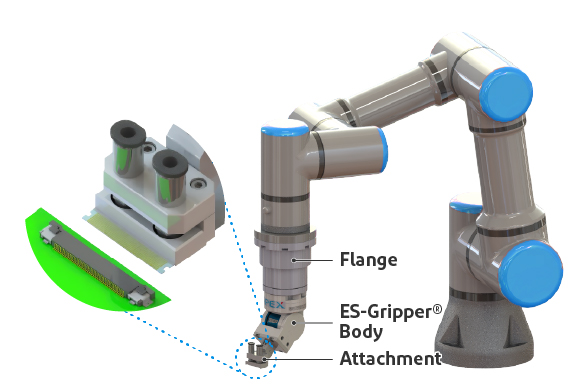 机器臂与 ES-Gripper®及附件的结构
机器臂与 ES-Gripper®及附件的结构- "ES-Gripper®" 检测插入力::
内置于"ES-Gripper®"的静电容量型转矩传感器"ESTORQ®"检测插入时的力(N),以数值判断嵌合状态。 - 兼容水平嵌合・垂直嵌合两种连接器::
准备了两种浮动(Floating)功能,可对应水平嵌合连接器与垂直嵌合连接器两种类型的自动嵌合。 - 兼容 I-PEX 以外的连接器::
不仅是 I-PEX 销售的连接器,对于其他公司销售的连接器也可实现自动嵌合。(是否可自动嵌合因连接器而异。)
关于静电容量型转矩传感器"ESTORQ®
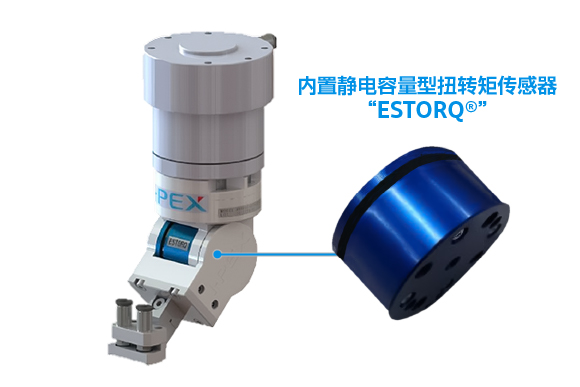 内置静电容量型扭转矩传感器"ESTORQ®"
内置静电容量型扭转矩传感器"ESTORQ®"
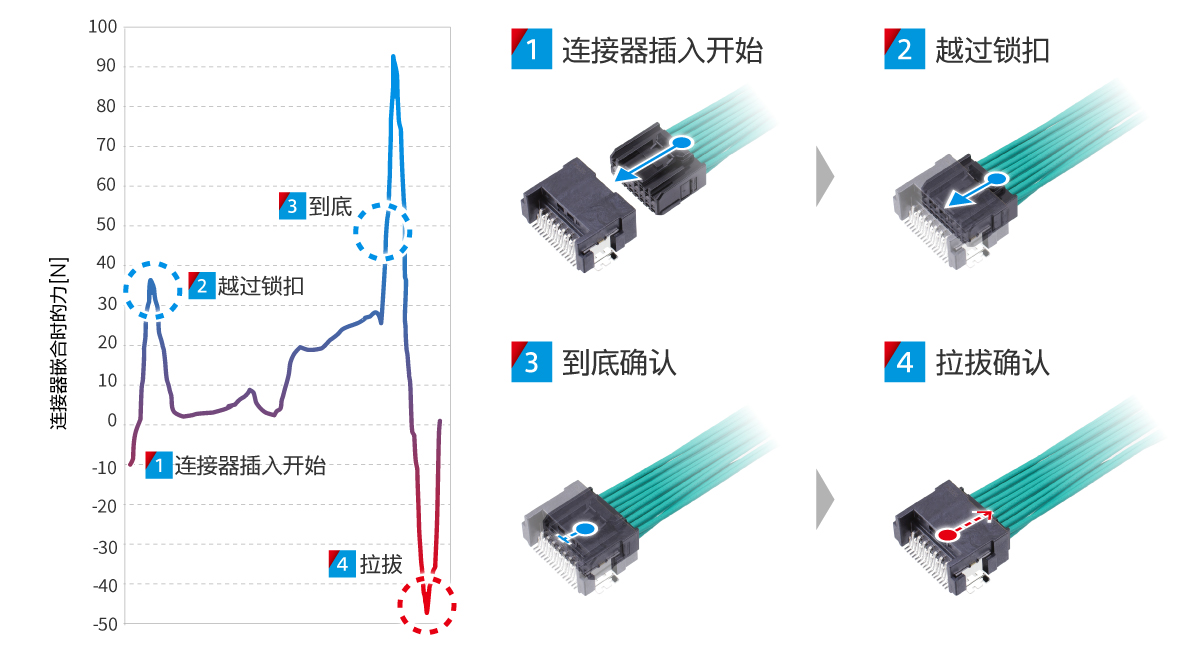
半嵌合・插入不足检测示意
"ES-Gripper®"实时获取连接器插入时的力(N),并基于图表化的插入力波形进行判定。
例如,以越锁 40N 以上、到底 50N 以上、拉拔检查 45N 以上等阈值进行管理,在 ①② 确认嵌合状态,在 ③ 验证不脱落。由此,可对带锁定功能的连接器的半嵌合或插入不足进行数值判定,并作为可追溯性记录。
连接器自动嵌合的验证案例
用一个通用附件对 3 种不同的
I-PEX 制连接器进行自动嵌合
熟知连接器的 I-PEX 机械设计工程师,设计出最优的附件。
在本演示视频中,设计了可用一个通用附件抓取以下 3 种 I-PEX 制连接器:
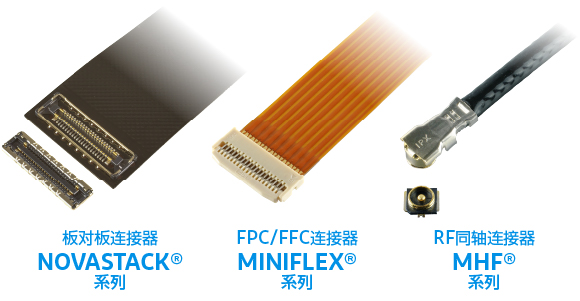 支持自动插入的 I-PEX 品牌连接器系列
支持自动插入的 I-PEX 品牌连接器系列
验证连接器自动嵌合的
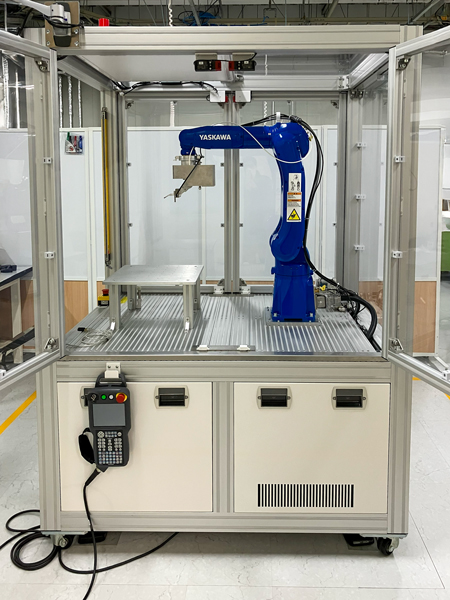
专用实验室
"CARA Lab"
在 I-PEX 公司内部设立的
专用设施"CARA Lab"中,
使用客户的产品,
将基于"ES-Gripper®"的传感器技术、
机器人控制以及运用 AI 的
视觉系统相结合,
进行自动嵌合验证。
自动嵌合验证可以做什么
自动嵌合验证是确认在客户产品上实际能否实现自动嵌合的重要步骤。
在 CARA Lab,作为连接器的自动嵌合验证,实施以下对应:
- 软件、硬件的设计
- 专用治具的制作
- 通过机器臂进行嵌合试验
- 通过"ES-Gripper®"进行测量
- 验证视频的拍摄、编辑
- 详细验证报告的制作
通过自动嵌合验证,制作对实际机器人动作进行拍摄、编辑的视频。不仅可直观确认嵌合过程,还提供汇总验证条件、测量数据及分析考察的详细报告。
客户可基于自动嵌合验证所获得的数据及视频,进行设备自动化的判断。
 CARA lab
CARA lab
在台湾、日本、中国三地提供支持
验证是确认在客户产品上实际能否实现自动嵌合的重要步骤。基于验证所获得的数据与视频,您可进行设备化的判断。
常见问题
- Q 是否支持非 I-PEX 连接器?
- A
是的,可以对应。不仅是 I-PEX 制连接器,对于其他公司制造的连接器的自动嵌合也可对应。我们将接收对象产品,在初期确认中判定嵌合可行性。
- Q 可以从哪个阶段开始咨询?
- A
可从构想阶段开始咨询。即使是在“想了解是否能自动嵌合”的初期探讨阶段,我们也会基于目标连接器的规格提出可行性评估建议。在量产线设计前进行咨询,可实现更顺畅的导入。
- Q 到设备导入需要多长时间?
- A
虽然取决于连接器的种类及要求,但从初期验证到设备导入,一般预计需要数月左右。首先进行对象连接器的嵌合验证,再基于其结果确定设备规格。详细日程请咨询我们。
- Q 能否集成到现有生产线中?
- A
是的,也支持集成到现有生产线中。CARA 设计为机械臂的末端执行器,可根据客户的生产设备或机器人进行导入。我们将在调研现有生产线状况后,提出最优的构成方案。
- Q 可追溯性的数据如何保存?
- A
通过内置于"ES-Gripper®"的转矩传感器"ESTORQ®",可记录连接器插入时、嵌合完成时、拉拔确认时的扭矩数据。这些数据可与客户的生产管理系统联动,作为可追溯性的一部分加以运用。
- Q 支持哪些机器人?
- A
支持主要厂商的工业机器人和协作机器人。由于是以机械臂末端执行器的形式安装 ES-Gripper®,因此也可导入到您现有的机器人上。
- Q 嵌合时是否存在损坏连接器的风险?
- A
“ES-Gripper®”搭载了基于扭矩传感器的实时插入力监控与对位校正机构。检测到异常时会自动停止,因此可将连接器损坏风险降至最低。
- Q 支持的连接器尺寸和种类是否有限制?
- A
包括 Wire-to-Board 连接器和 RF 连接器在内,支持多种类型的连接器。是否支持需根据尺寸和形状进行个别验证,请先告知我们目标连接器的信息。
- Q 导入后的支持体制如何?
- A
导入后我们也提供技术支持。包括运行过程中的故障处理、增加对新连接器品种的支持等,我们将持续提供支持。
 传感器
传感器
-
如需了解“Smart Cloth”的更多信息,请使用以下电话号码或表格与我们联系。
- 传感器
- 新产品
- 智能工厂/DX
- 机器人技术
- I-PEX的解决方案
-
助力汽车制造现场实现质量保证与省人化
正式全面销售覆盖连接器自动嵌合验证至设备导入的整体解决方案“CARA”
~为工序质量可视化与可追溯性强化作出贡献~- 传感器
- 连接器
- 新产品
- 智能工厂/DX
- 模具和自动化设备

-
我司员工将在「SIer's Day in 近畿(京都)」上登台演讲
- 展览会
- 传感器
- 活动报道
-
新型气味传感器“noseStick BB”将于2026年2月发布 - 兼容低功耗蓝牙®,可进行无线传感,适用于各种安装位置 -
- 气味传感器
- 传感器
- 新产品
- 新闻公告
