Automated Connector Mating
Assurance System — CARA
From verification to full equipment integration — connector mating automation, delivered end to end
A complete solution that guarantees automated mating, compatible with both I-PEX and non-I-PEX connectors
CARA is I-PEX's automated connector mating system, built to automate one of manufacturing's most difficult tasks: connector mating. We support you every step of the way — from initial feasibility checks and consulting, through verification, to the design, build, and delivery of fully automated mating equipment.
And it's not limited to I-PEX connectors.
CARA can verify automated mating for virtually any connector or harness.
Whether you're still shaping the concept or tackling a specific technical hurdle, please feel free to consult with us.
CARA solves challenges related to automated connector mating
CARA is built for teams wrestling with connector and harness mating, including those who want to:
- Automate the connector mating process
- Eliminate the risk of partial mating
- Build traceability directly into the production line
- Introduce equipment capable of automated connector mating
- Get expert input from the earliest planning stages
Contact us about
automatic connector mating
Why connector mating is
so hard to automate
Connector mating is unforgiving: even a slight misalignment or minor part-to-part variation can result in a partial mating.
A robot may be able to insert a connector but confirming that it has actually seated correctly is far more difficult.
As a result, automation has barely advanced anywhere in the world —
leaving quality risks and heavy manual workloads as persistent challenges.
Under-insertion
and partial mating
Manual operators judge mating completion
by feel, which opens the door to under-
insertion and partial mating— a leading
cause of product defects and field failures.
Misalignment, part variation,
and inconsistency
Due to differences in connector positioning
and part-to-part variation,
simple robotic position control alone
can't deliver consistent, reliable mating.
Limited quality
assurance and traceability
When no mating data is captured,
quality cannot be verified
and traceability is lost.
CARA brings automation to a process
the industry has long
considered too difficult to automate.
What is CARA?
Connector
Assembly
Robotics
Automation
CARA is a
completed, end-to-end solution that brings together everything needed to
automate connector mating—
and builds the automation equipment around it.
I-PEX combines its connector know-how built over decades
with its robotics and sensor technology.
Robotics and
sensors technology
Expertise from
connectors development

As an established connector manufacturer,
I-PEX understands connectors from
the inside out and proposes the
optimal automatic mating solution.
Everything you need to automate connector
mating, from a single partner
-
 Connector
Connector
-
 Harness
Harness
-
 Sensor
Sensor
-
 Robot
Robot
-
 Gripper
Gripper
-
 Vision
Vision
-
 System
System
-
 Jigs
Jigs
-
 Verification
Verification
-
 Equipment setup & rollout
Equipment setup & rollout
I-PEX prepares every element required
for automatic connector mating.
What CARA delivers
CARA pairs image-recognition position correction with insertion-force detection to verify every connection.
I-PEX doesn't stop at proving connectors that can be mated automatically—
we build your process into one that runs reliably in full-scale production.
The result: fewer mating defects across connectors and harnesses,
and a real answer to labor shortages and rising personnel costs.
Verifying automatic connector
mating at our CARA Lab
CARA Lab is our specialized facility for automatic connector mating. We assess whether
your application can be automated
and deliver a clear report on the findings.
Reliable mating, guaranteed
by a purpose-built end-effector
Purpose-built for connector mating,
our robotic end-effector uses force sensing
to prevent half-mating and
incomplete insertion—ensuring quality.
Translating verified results
into a fully running line
Drawing on the CARA Lab findings and your specific requirements, we design and
build equipment tailored to your production line—and support you all the way to start-up.
Ultimately, CARA's goal is simple:
verify your connector mating process then automate it.
How we bring the Connector Assembly Robotics Automation
to your line
From the initial assessment (consulting) through verification and equipment build, I-PEX provides a total solution.
Layout, control specifications, data integration, and more are flexibly tailored to your production line.
-
1
Initial assessment of automatic mating
(consulting)We take in your target products and workpieces and determine whether the connectors and harnesses in that process can be mated automatically.
- Hands-on assessment using your actual product/workpiece
- Clarifying challenges and defining the direction forward
- Delivery of an initial assessment report
-
2
Automatic mating verification
at CARA LabWe put automatic mating to the test at our CARA Lab. I-PEX handles everything through to the software and hardware design needed for the mating trial.
- Mating trials at CARA Lab
- Software/hardware design and jig fabrication
- Results delivered via video and detailed report
-
3
Manufacturing and delivering your automatic mating equipment
Working from the verification results and the specifications we agree on together, I-PEX builds and delivers the actual production equipment—so automatic mating runs dependably right inside your process.
- Equipment designed and built to your specifications
- Delivery and start-up support for the complete system
- Post-launch support
Contact us about connector mating automation
Traceability built intro CARA
CARA reads the insertion force in real time using ES-Gripper®, the robotic end-effector I-PEX developed specifically for automatic connector mating—then judges the mating status against preset conditions.
By setting mating conditions within the process—lock-over, bottoming-out, and a pull (retention) check—
CARA catches half-mating and incomplete insertion before they become defects.
Every judgment and insertion-force reading can be logged, giving you a record to support quality assurance and full traceability.
Powered by
ES-Gripper®,
the robotic end-effector built for CARA
At the heart of CARA's mating guarantee is ES-Gripper®, a robotic end-effector I-PEX engineered exclusively for automatic connector mating.
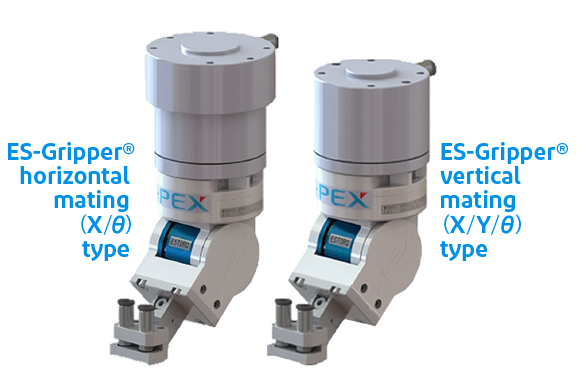 ES-Gripper® horizontal and vertical mating types
ES-Gripper® horizontal and vertical mating types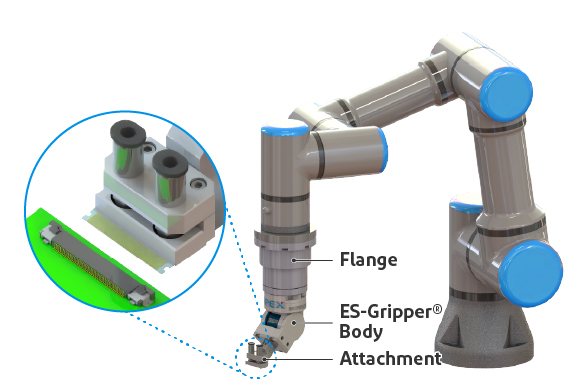 Structure of the robot arm, ES-Gripper®, and attachment
Structure of the robot arm, ES-Gripper®, and attachment- ES-Gripper® detects insertion force:
The built-in capacitive torque sensor ESTORQ® measures the force (N) as the connector goes in, turning mating status into a clear, numerical reading. - Handles both horizontal- and vertical-mating connectors:
Two types of floating mechanisms are available, supporting automatic mating of both horizontal-mating and vertical-mating connectors. - Compatible with non-I-PEX connectors:
Automatic mating isn't limited to I-PEX connectors—it works with other manufacturers' connectors too. (Whether a given connector can be mated automatically depends on the connector itself.)
About the capacitive torque sensor ESTORQ®
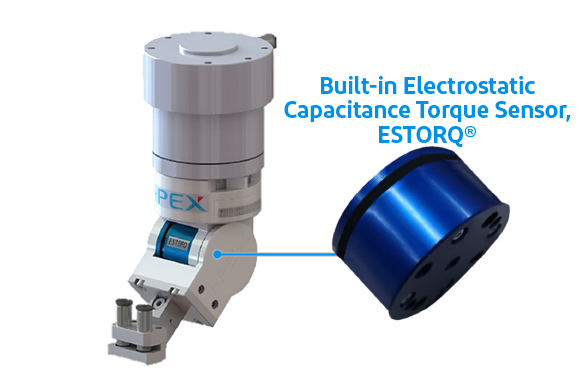
ES-Gripper® is equipped with our capacitive torque sensor, ESTORQ®. Learn more about ESTORQ® here.
Electrostatic Capacitance Torque Sensor, ESTORQ®
 Electrostatic Capacitance Torque Sensor, ESTORQ®
Electrostatic Capacitance Torque Sensor, ESTORQ®
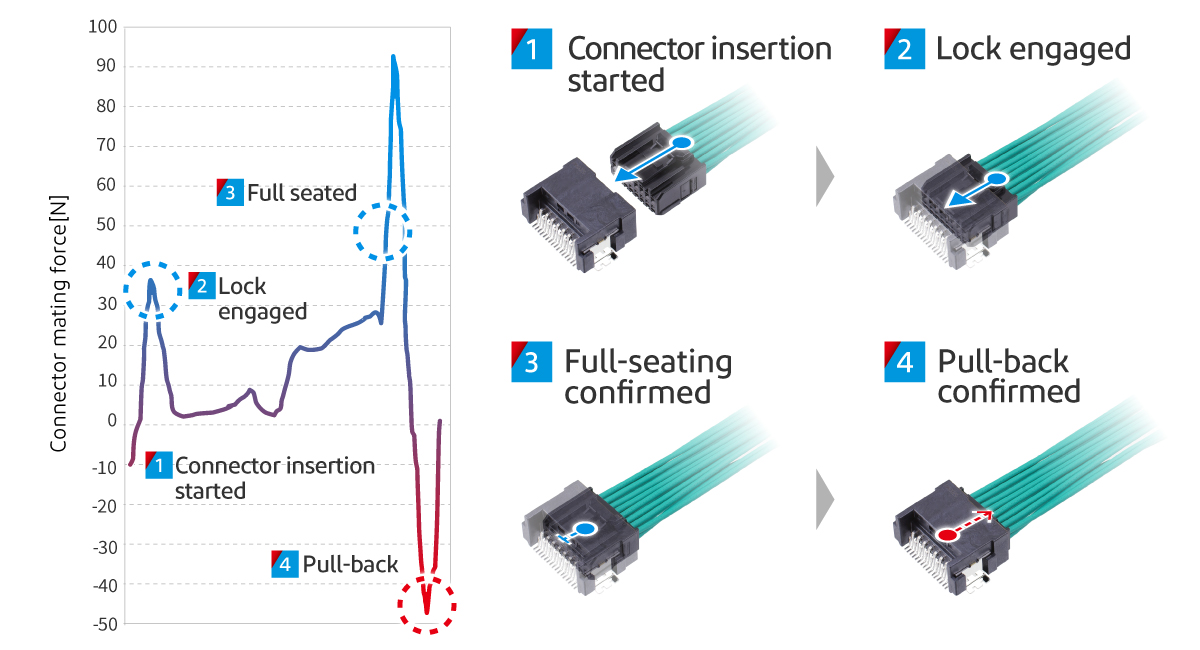
How CARA detects half-mating and incomplete insertion
ES-Gripper® captures the insertion force (N) in real time and makes its call from the resulting force waveform.
For instance, by managing thresholds such as 40 N for lock-over, 50 N for bottoming-out, and 45 N for the pull check, steps ① and ② confirm the connection is properly mated, while step ③ verifies it won't pull out. That means half-mating and incomplete insertion in locking connectors are caught as hard numbers—and recorded for traceability.
Automatic connector mating—verification examples
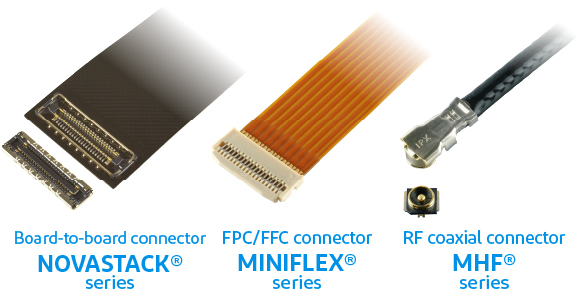
One shared attachment, three different I-PEX connectors
—mated automatically
Our mechanical design engineers know connectors inside out, and they design the ideal attachment for every application.
In this demo, a single shared gripper is engineered to pick up all three of these I-PEX connectors:
- Board-to-board connector NOVASTACK® series
- FPC/FFC connector MINIFLEX® series
- RF coaxial connector MHF® series
 I-PEX brand connector series compatible with automatic insertion
I-PEX brand connector series compatible with automatic insertion
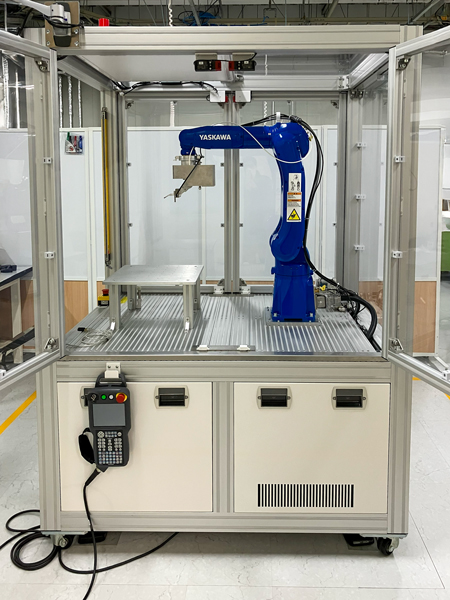
CARA Lab our dedicated lab
for verifying
automatic connector mating
At
CARA Lab, our dedicated facility within I-PEX, we put our own products to
the test—bringing together
ES-Gripper® sensing technology,
robotic control, and an AI-driven vision system
to verify automatic mating.
What verification gives you
Verification is the critical step that confirms whether automatic mating will really work with your products.
At CARA Lab, that means:
- Software and hardware design
- Custom jig fabrication
- Mating trials on a robotic arm
- Measurement with ES-Gripper®
- Filmed and edited verification footage
- A detailed verification report
Through the verification, we film and edit the actual robot at work, so you can see the mating process for yourself—backed by a thorough report covering the test conditions, measurement data, and our analysis.
With that data and video in hand, you have everything you need to decide whether to move ahead with automation.
 CARA lab
CARA lab
Support in three locations: Taiwan, Japan, and China
Verification is the critical step for confirming that automatic mating will work with your products—and the data and video it produces give you a clear basis for your equipment decision.
CARA Lab (Xinbei, Taiwan)
Our R&D hub for CARA development, integration, and application verification.
CARA Lab (Shanghai, China)
Where customers in Shanghai, China can experience CARA firsthand.
Frequently asked questions
- Q Can you work with connectors that aren't made by I-PEX?
- A
Absolutely. We handle automatic mating for both I-PEX and other manufacturers' connectors. Just send us your target product, and we'll assess whether it can be mated during the initial review.
- Q At what stage can we start consulting with you?
- A
As early as the concept stage. Even if you're simply wondering "is automatic mating possible at all?", we'll assess feasibility from your connector's specifications. Reaching out before you design your mass-production line makes for a far smoother rollout.
- Q How long until the equipment is up and running?
- A
It depends on the connector type and your requirements, but from initial verification to installation typically takes a few months. We begin with mating verification of your connector, then finalize the equipment specs based on what we find. Contact us for a detailed timeline.
- Q Can it be built into our existing production line?
- A
Yes. Because CARA is designed as a robotic-arm end-effector, it fits right into your existing equipment and robots. We'll review your current line and propose the best configuration for it.
- Q How is traceability data stored?
- A
The ESTORQ® torque sensor inside ES-Gripper® records torque data at insertion, at completed mating, and during the pull check. This data can be linked to your production management system and used as part of your traceability records.
- Q Which robots does it work with?
- A
We support industrial and collaborative robots from major manufacturers. Since ES-Gripper® attaches as a robotic-arm end-effector, it can be deployed on robots you already use.
- Q Is there a risk of damaging the connector during mating?
- A
ES-Gripper® combines real-time insertion-force monitoring through its torque sensor with an alignment-correction mechanism. If it detects anything abnormal, it stops automatically—keeping the risk of connector damage to a minimum.
- Q Are there limits on connector size or type?
- A
We handle a wide range of connectors, from wire-to-board to RF. Compatibility with a specific size or shape is confirmed through individual verification, so just share your connector details to get started.
- Q What support do you offer after installation?
- A
Our technical support continues well past installation—from troubleshooting during operation to adding support for new connector types as your needs evolve.
 Sensors
Sensors
-
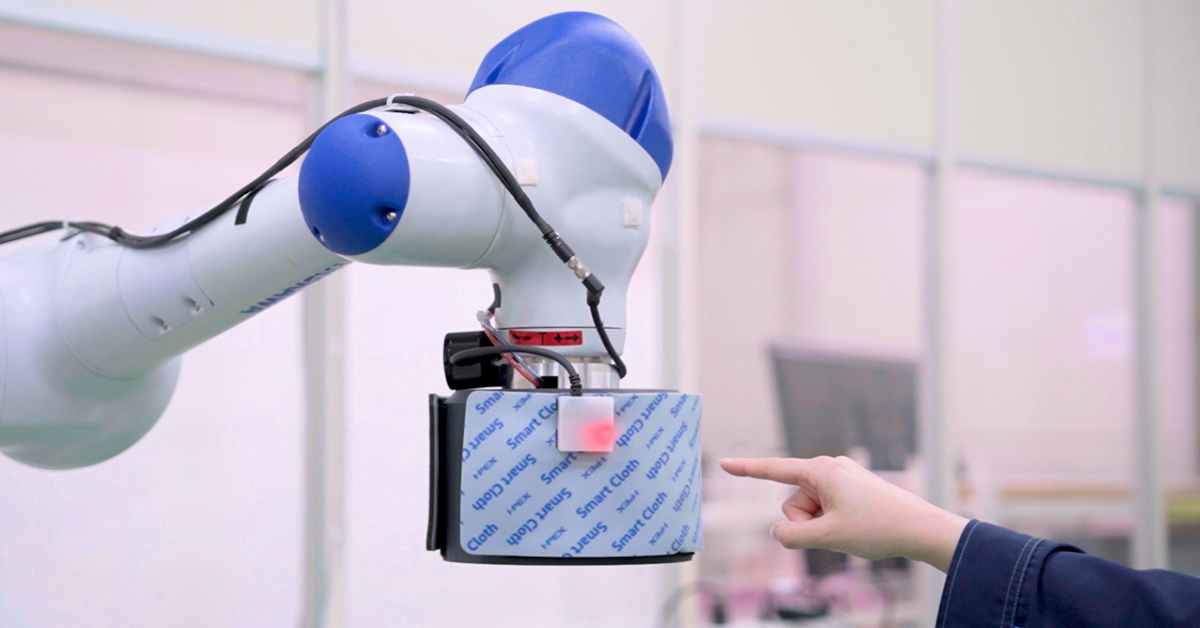
How Smart Cloth, a Fabric-Based Proximity Sensor is Advancing Safe Human-Machine Coexistence
- Sensors
- New Products
- Smart Factory / DX
- Robotics
- I-PEX Solutions
-
Supporting Quality Assurance and Labor Savings on Automotive Manufacturing Floors
Full-Scale Launch of "CARA": A Total Solution from Automated Connector Mating Verification to Equipment Installation- Sensors
- Connectors
- New Products
- Smart Factory / DX
- Molds/Automation System

-
I-PEX Employee to Present at "SIer's Day in Kinki (Kyoto)"
- Exhibition
- Sensors
- Event Report
-
New smell sensor "noseStick BB" to be released in February 2026 - Compatible with Bluetooth® Low Energy for wireless sensing, enabling sensing in a variety of installation locations -
- Smell Sensor
- Sensors
- New Products
- Press Release
